Venue
- ICRA-2021
Date
- 2021
Share



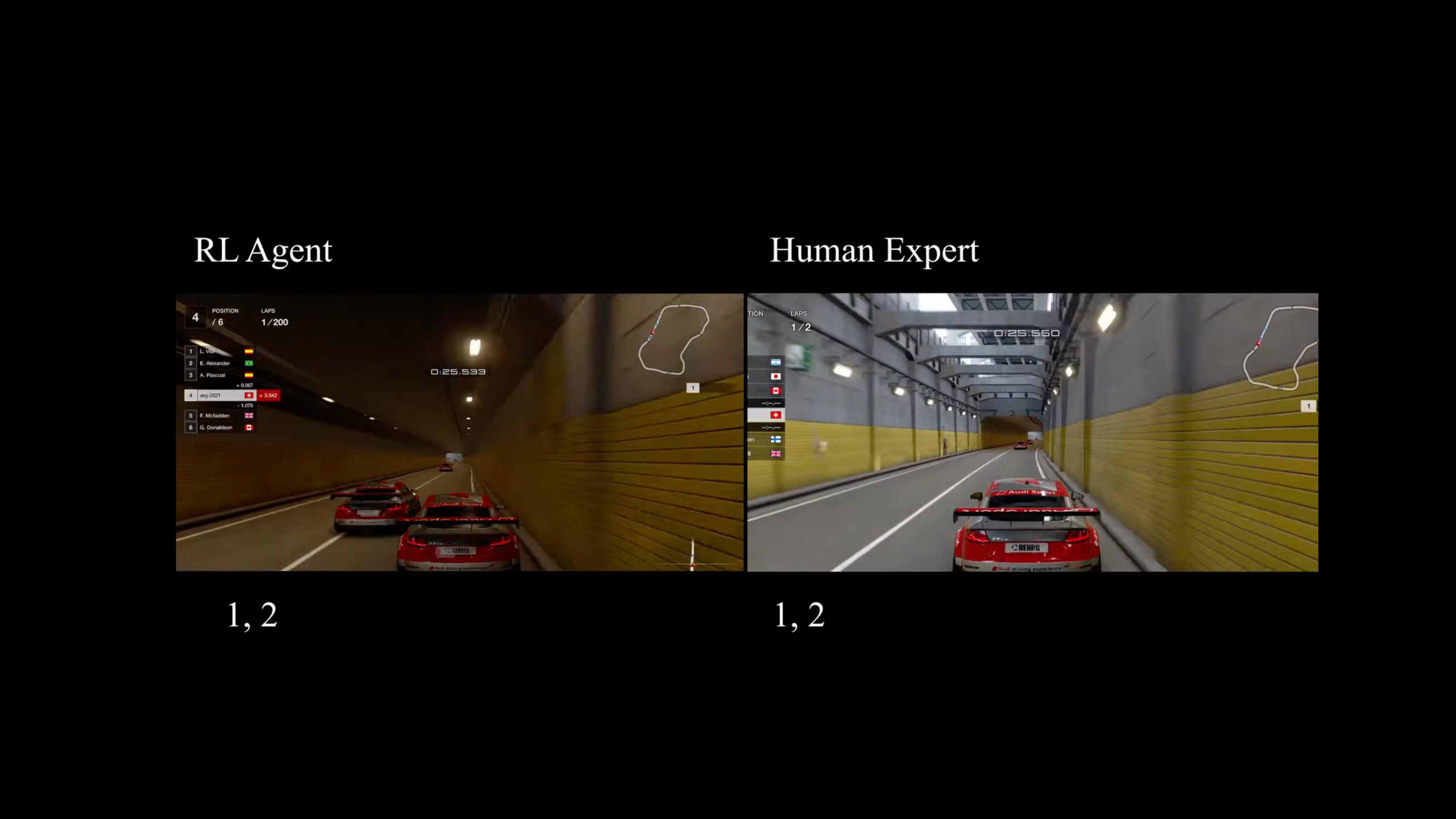
Autonomous Overtaking in Gran Turismo Sport Using Curriculum Reinforcement Learning
Yunlong Song*
Hao Chih Lin
Elia Kaufmann*
Davide Scaramuzza*
* External authors
ICRA-2021
2021
Abstract
Professional race-car drivers can execute extreme overtaking maneuvers. However, existing algorithms for autonomous overtaking either rely on simplified assumptions about the vehicle dynamics or try to solve expensive trajectory-optimization problems online. When the vehicle approaches its physical limits, existing model-based controllers struggle to handle highly nonlinear dynamics, and cannot leverage the large volume of data generated by simulation or real-world driving. To circumvent these limitations, we propose a new learning-based method to tackle the autonomous overtaking problem. We evaluate our approach in the popular car racing game Gran Turismo Sport, which is known for its detailed modeling of various cars and tracks. By leveraging curriculum learning, our approach leads to faster convergence as well as increased performance compared to vanilla reinforcement learning. As a result, the trained controller outperforms the built-in model-based game AI and achieves comparable overtaking performance with an experienced human driver.
Related Publications
Many potential applications of artificial intelligence involve making real-time decisions in physical systems while interacting with humans. Automobile racing represents an extreme example of these conditions; drivers must execute complex tactical manoeuvres to pass or block…
Autonomous car racing is a major challenge in robotics. It raises fundamental problems for classical approaches such as planning minimum-time trajectories under uncertain dynamics and controlling the car at the limits of its handling. Besides, the requirement of minimizing t…
JOIN US
Shape the Future of AI with Sony AI
We want to hear from those of you who have a strong desire
to shape the future of AI.

